در زیر با یک مدار کنترل از راه درو که تا فاصله 10 متر و بیشتر را کنترل می کند.، آشنا می شو ید.این مدار شامل دو قسمت گیرنده و فرستنده است.به همرا دوعدد سنسور مادون قرمز که یکی در قسمت گیرنده و دیگری در قسمت فرستنده است.
این مدار یک مدار یک کاناله است.یعنی شما می توانید تنها یک سویچ را تحریک کنید یا یک LED را روشن و خاموش کنید.
در واقع کنترل شما تنها بر روی یک نقطه است.
هر دو قسمت فرستنده و گیرنده را به صورت مجزا بر روی دو برد برد مجزا پیاده سازی کنید.
قطعات مورد نیاز
قسمت فرستنده
<ol dir="rtl"> <li dir="rtl">
1 عدد آیسی 555 <li dir="rtl">
1 عدد کلید push -bottom <li dir="rtl">
1 عدد سنسور مادون قرمز فرستنده <li dir="rtl">
2 عدد خازن 0.01UF <li dir="rtl">
1 عدد مقاومت 10 اهم <li dir="rtl">
1 عدد مقاومت 1.8 کیلو اهم <li dir="rtl">
1 عدد مقاومت 220 اهم <li dir="rtl">
1 عدد رگولاتور 7805 <li dir="rtl">
1 عدد خازن 470 میکروفاراد
قسمت گیرنده
<ol dir="rtl"> <li dir="rtl">
1 عدد سنسور مادون قرمز گیرنده با نام PIC-2319SMB <li dir="rtl">
1 عدد آیسی 555 <li dir="rtl">
2 عدد خازن 10 میکروفاراد <li dir="rtl">
2 عدد خازن 0.01 میکروفاراد <li dir="rtl">
1 عدد مقاومت 470 اهم <li dir="rtl">
1 عدد مقاومت 100 اهم <li dir="rtl">
1 عدد مقاومت 10 کیلو اهم <li dir="rtl">
1 عدد مقاومت 100 کیلو اهم <li dir="rtl">
1 عدد LED <li dir="rtl">
2 عدد برد بورد <li dir="rtl">
سیم تلفنی <li dir="rtl">
1 عدد رگولاتور 7805 <li dir="rtl">
1 عدد خازن 470 میکروفاراد
نقشه مدار فرستنده
در نقشه همانطور که ملاحظه می کنید.در قسمت تغذیه که جدا از مدار اصلی کشیده شده از یک رگولاتور 7805 استفاده شده است.ولتاژ ورودی بین 9 تا 12 ولت و پایه وسط این رگولاتور زمین شده است.پایه خروجی که ولتاژ 5 ولت را برای تغذیه مدار می سازد نیز با یک خازن 470 میکروفاراد به زمین اتصال داده شده است.
برای مشاهده datasheet رگولاتور وارد لینک زیر شود.برای مشاهده حتما بایست برنامه ACROBATREADER را در کامپیوتر خود داشته باشید.
L7805
مطابق معمول در ابتدا تغذیه آیسی را ببندید.پایه 8 و 4 تغذیه مثبت و پایه 1 تغذیه زمین است.،این پایه ها را بر روی برد بورد با استفاده از سیم تلفنی متصل کنید.پایه 2و6 را به طور مستقیم به یکدیگر متصل کنید.از اتصال مشترک پایه های 2و6 با یک مقاومت 1.8 کیلو اهم به پایه 7 ارتباط دهید.
حال از پایه 7 با یک مقاومت 220 اهم به مثبت منبع تغذیه متصل نمایید.
باز از پایه های مشترک شده 6و2 با یک خازن 10 میکروفاراد به زمین متصل نمایید.
پایه 5 آیسی 555 را نیز به طور مستقیم با یک خازن 0.01میکروفاراد به زمین متصل کنید.
|
|
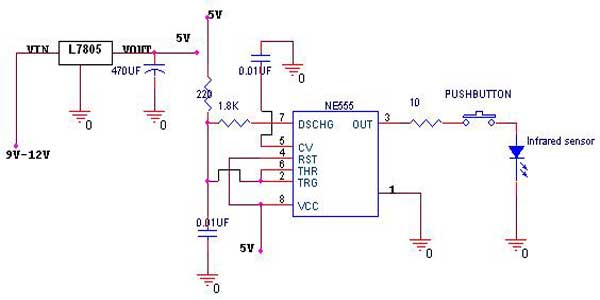
پایه 3 را با یک مقاومت 10 اهم به یک سر کلید push-bottom و سر دیگر کلید push-bottom به سر مثبت یا آند سنسور فرستنده مادون قرمز متصل کنید.وسر منفی یا کاتد این فرستنده را به زمین متصل نمایید.
مسیر شارژ و دشارژ این آیسی توسط مقاومتهای 1.8کیلو اهم،220 اهم و خازن 0.01 میکروفاراد در پایه های 2و6و 7 ایجاد می شود.
همانطور که در شکل زیر مشاهده می کنید این آیسی به صورت آ استابل بسته شده است.در مورد نحوه کار این آیسی می توانید وارد لینک های زیر شو ید.در این لینک ها می توانید.با نحوه تولید پالس در وانواع مختلف نحوه بستن آیسی555 آشنا شوید.
<li dir="rtl">
تایمر مونواستابل <li dir="rtl">
تایمر متناوب 1 <li dir="rtl">
برای جلوگیری از نویز بین پایه های مثبت و منفی یک عدد خازن 470 میکروفاراد در قسمت فرستنده قرار دهید.
پالسهای مربعی شکل خروجی از پایه 3 آیسی 555 را می توانید توسط <u>اسیلسکوپ</u> مشاهده کنید.
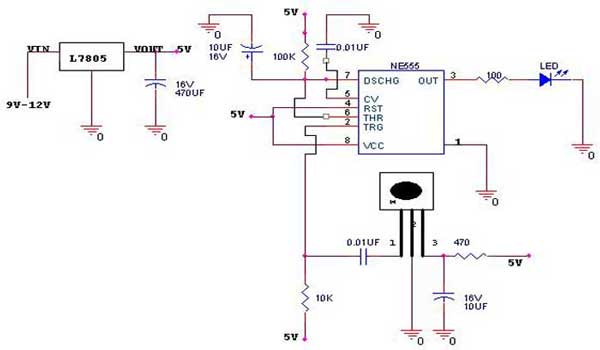
نقشه مدار گیرنده
تغذیه قسمت گیرنده نیز مانند قسمت فرستنده است.به این قسمت در قسمت فرستنده دقت کنید.
مطابق معمول تغذیه مثبت و زمین آیسی 555 را در ابتدا وصل کنید.پایه های 4و 8 آیسی 555 رابه مثبت منبع تغذیه و پایه 1 را به زمین متصل نمایید.
به پایه های سنسور مادون قرمز PIC-2319SMB به دقت نگاه کنید این سنسور دارای سه پایه است.یک پایه مربوط به تغذیه پایه دیگر زمین و پایه سوم پایه خروجی است.که نسبت به دریافت امواج مادون قرمز از خود واکنش نشان می دهد.
در بالای پایه خروجی این سنسور حرف E انگلیسی به صورت برعکس وجود دارد.
پایه کنار این پایه،پایه 2 این سنسور است که می بایست زمین شود.پایه بعدی پایه شماره 3 یا پایه تغذیه است.
این نوع سنسورهای گیرنده مادون قرمز به خاطر داشتن تغذیه حداکثر فاصله اییکه سنس می کنند.بیشتر از سنسورهای دو پایه معمولی است.
پایه 2 این سنسور را همانطور که در نقشه مشخص است.به زمین متصل کنید.پایه 3 را یکبار با مقاومت 470 اهم به مثبت ولتاز و از همین پایه با یک خازن 10 میکروفاراد به زمین متصل کنید به صورتیکه پایه منفی این خازن در زمین باشد.
پایه یک این سنسور را با یک خازن 0.01 میکروفاراد به پایه 2 آیسی 555 و از پایه 2 با یک مقاومت 10 کیلو اهم به مثبت منبع تغذیه متصل کنید.
پایه 6و 7 را به یکدیگر متصل کنید.،و از این اشتراک با یک مقاومت 100 کیلواهم به مثبت منبع تغذیه متصل نمایید.
پایه 5 را با یک خازن 0.01 میکروفاراد به زمین متصل نمایید.پایه خروجی 3 را با یک مقاومت 470 اهم به سر مثبت یا آند LED متصل نمایید.
همانطور که در شکل مشخص است.در قسمت گیرنده آیسی 555 به صورت مونو استابل بسته شده است.در واقع این آیسی می بایست از جایی تحریک شود .تا در خروجی پالس ایجاد کند.تحریک این پایه همانطور که در نقشه مشخص است.،بوسیله پایه 1 سنسور PIC-2319SMB انجام می گیرد.زمانیکه پایه 2 آیسی 555 تحریک شود.خازن 10 میکروفارادی به همراه مقاومت 100 کیلواهم شروع به شارژ می کند.
تحریک پایه 2 با ولتاژ زمین یا صفر است.
در مدت شارژ خازن تا اینکه کاملا شارژ شود در خروجی لبه بالارونده پالس را داریم.در این مدت LED روشن می مانند.پس از شارژ کامل خازن پایه 6 آیسی 555 تحریک می شود.با تحریک این پایه در خروجی لبه پایین رونده پالس را داریم در این مدت LED خاموش است.،چرا که اختلاف پتانسیل بوجود آمده در جهت عکس قرار گرفتن LED است.اگر جهت LED را عوض کنید در هنگام ارسال پالس LED خاموش می شود.،ودر حالت عادی که پالسی ارسال نمی شود .،روشن باقی می ماند.،تا اینکه شما دومرتبه با فشار کلید PUSH -BOTTOM در قسمت فرستنده ، پایه 2 آیسی 555 را در قسمت گیرنده تحریک کنید.اگر از خازنی بزرگتر از 10 میکروفاراد استفاده کنید.،مدت زمانیکه LED روشن می ماند بیشتر خواهد بود.
و اگر از خازنهای کوچگتر از 10 میکروفاراد استفاده کنید.LED پس از روشن شدن به سرعت خاموش می شود.
اگر رنج خازنی که استفاده می کنید.،خیلی کوچک باشد.، شما دیگر روشن شدن LED را نخواهید دید.،چراکه سرعت شارژ شدن خازن و تحریک پایه 6 آیسی 555 آنقدر سریع است که LED فرصت واکنش یا عکس العمل را ندارد.
اگر بخواهید خروجی شما در قسمت گیرنده تا ارسال پالس بعدی از فرستنده HIGH باشد.، یا LED روشن باقی بماند.می بایست از آیسی های نگهدارنده یا LATCH استفاده کنید.به جای LED از هر المان دیگری مانند یک سوییچ یا رله و بیزر نیز می توانید استفاده کنید.انتخاب المان بستگی به طراحی شما دارد.
همانطور که در ابتدا گفته شد هر یک از مدارت فرستنده و گیرنده را بر روی دو برد بورد یا برد مسی سوراخدار مجزا قرار دهید.
|
|
در زیر با یک مدار کنترل از راه درو که تا فاصله 10 متر و بیشتر را کنترل می کند.، آشنا می شو ید.این مدار شامل دو قسمت گیرنده و فرستنده است.به همرا دوعدد سنسور مادون قرمز که یکی در قسمت گیرنده و دیگری در قسمت فرستنده است.
این مدار یک مدار یک کاناله است.یعنی شما می توانید تنها یک سویچ را تحریک کنید یا یک LED را روشن و خاموش کنید.
در واقع کنترل شما تنها بر روی یک نقطه است.
هر دو قسمت فرستنده و گیرنده را به صورت مجزا بر روی دو برد برد مجزا پیاده سازی کنید.
قطعات مورد نیاز
قسمت فرستنده
<ol dir="rtl"> <li dir="rtl">
1 عدد آیسی 555 <li dir="rtl">
1 عدد کلید push -bottom <li dir="rtl">
1 عدد سنسور مادون قرمز فرستنده <li dir="rtl">
2 عدد خازن 0.01UF <li dir="rtl">
1 عدد مقاومت 10 اهم <li dir="rtl">
1 عدد مقاومت 1.8 کیلو اهم <li dir="rtl">
1 عدد مقاومت 220 اهم <li dir="rtl">
1 عدد رگولاتور 7805 <li dir="rtl">
1 عدد خازن 470 میکروفاراد
قسمت گیرنده
<ol dir="rtl"> <li dir="rtl">
1 عدد سنسور مادون قرمز گیرنده با نام PIC-2319SMB <li dir="rtl">
1 عدد آیسی 555 <li dir="rtl">
2 عدد خازن 10 میکروفاراد <li dir="rtl">
2 عدد خازن 0.01 میکروفاراد <li dir="rtl">
1 عدد مقاومت 470 اهم <li dir="rtl">
1 عدد مقاومت 100 اهم <li dir="rtl">
1 عدد مقاومت 10 کیلو اهم <li dir="rtl">
1 عدد مقاومت 100 کیلو اهم <li dir="rtl">
1 عدد LED <li dir="rtl">
2 عدد برد بورد <li dir="rtl">
سیم تلفنی <li dir="rtl">
1 عدد رگولاتور 7805 <li dir="rtl">
1 عدد خازن 470 میکروفاراد
نقشه مدار فرستنده
در نقشه همانطور که ملاحظه می کنید.در قسمت تغذیه که جدا از مدار اصلی کشیده شده از یک رگولاتور 7805 استفاده شده است.ولتاژ ورودی بین 9 تا 12 ولت و پایه وسط این رگولاتور زمین شده است.پایه خروجی که ولتاژ 5 ولت را برای تغذیه مدار می سازد نیز با یک خازن 470 میکروفاراد به زمین اتصال داده شده است.
برای مشاهده datasheet رگولاتور وارد لینک زیر شود.برای مشاهده حتما بایست برنامه ACROBATREADER را در کامپیوتر خود داشته باشید.
L7805
مطابق معمول در ابتدا تغذیه آیسی را ببندید.پایه 8 و 4 تغذیه مثبت و پایه 1 تغذیه زمین است.،این پایه ها را بر روی برد بورد با استفاده از سیم تلفنی متصل کنید.پایه 2و6 را به طور مستقیم به یکدیگر متصل کنید.از اتصال مشترک پایه های 2و6 با یک مقاومت 1.8 کیلو اهم به پایه 7 ارتباط دهید.
حال از پایه 7 با یک مقاومت 220 اهم به مثبت منبع تغذیه متصل نمایید.
باز از پایه های مشترک شده 6و2 با یک خازن 10 میکروفاراد به زمین متصل نمایید.
پایه 5 آیسی 555 را نیز به طور مستقیم با یک خازن 0.01میکروفاراد به زمین متصل کنید.
|
|
پایه 3 را با یک مقاومت 10 اهم به یک سر کلید push-bottom و سر دیگر کلید push-bottom به سر مثبت یا آند سنسور فرستنده مادون قرمز متصل کنید.وسر منفی یا کاتد این فرستنده را به زمین متصل نمایید.
مسیر شارژ و دشارژ این آیسی توسط مقاومتهای 1.8کیلو اهم،220 اهم و خازن 0.01 میکروفاراد در پایه های 2و6و 7 ایجاد می شود.
همانطور که در شکل زیر مشاهده می کنید این آیسی به صورت آ استابل بسته شده است.در مورد نحوه کار این آیسی می توانید وارد لینک های زیر شو ید.در این لینک ها می توانید.با نحوه تولید پالس در وانواع مختلف نحوه بستن آیسی555 آشنا شوید.
<li dir="rtl">
تایمر مونواستابل <li dir="rtl">
تایمر متناوب 1 <li dir="rtl">
برای جلوگیری از نویز بین پایه های مثبت و منفی یک عدد خازن 470 میکروفاراد در قسمت فرستنده قرار دهید.
پالسهای مربعی شکل خروجی از پایه 3 آیسی 555 را می توانید توسط <u>اسیلسکوپ</u> مشاهده کنید.
نقشه مدار گیرنده
تغذیه قسمت گیرنده نیز مانند قسمت فرستنده است.به این قسمت در قسمت فرستنده دقت کنید.
مطابق معمول تغذیه مثبت و زمین آیسی 555 را در ابتدا وصل کنید.پایه های 4و 8 آیسی 555 رابه مثبت منبع تغذیه و پایه 1 را به زمین متصل نمایید.
به پایه های سنسور مادون قرمز PIC-2319SMB به دقت نگاه کنید این سنسور دارای سه پایه است.یک پایه مربوط به تغذیه پایه دیگر زمین و پایه سوم پایه خروجی است.که نسبت به دریافت امواج مادون قرمز از خود واکنش نشان می دهد.
در بالای پایه خروجی این سنسور حرف E انگلیسی به صورت برعکس وجود دارد.
پایه کنار این پایه،پایه 2 این سنسور است که می بایست زمین شود.پایه بعدی پایه شماره 3 یا پایه تغذیه است.
این نوع سنسورهای گیرنده مادون قرمز به خاطر داشتن تغذیه حداکثر فاصله اییکه سنس می کنند.بیشتر از سنسورهای دو پایه معمولی است.
پایه 2 این سنسور را همانطور که در نقشه مشخص است.به زمین متصل کنید.پایه 3 را یکبار با مقاومت 470 اهم به مثبت ولتاز و از همین پایه با یک خازن 10 میکروفاراد به زمین متصل کنید به صورتیکه پایه منفی این خازن در زمین باشد.
پایه یک این سنسور را با یک خازن 0.01 میکروفاراد به پایه 2 آیسی 555 و از پایه 2 با یک مقاومت 10 کیلو اهم به مثبت منبع تغذیه متصل کنید.
پایه 6و 7 را به یکدیگر متصل کنید.،و از این اشتراک با یک مقاومت 100 کیلواهم به مثبت منبع تغذیه متصل نمایید.
پایه 5 را با یک خازن 0.01 میکروفاراد به زمین متصل نمایید.پایه خروجی 3 را با یک مقاومت 470 اهم به سر مثبت یا آند LED متصل نمایید.
همانطور که در شکل مشخص است.در قسمت گیرنده آیسی 555 به صورت مونو استابل بسته شده است.در واقع این آیسی می بایست از جایی تحریک شود .تا در خروجی پالس ایجاد کند.تحریک این پایه همانطور که در نقشه مشخص است.،بوسیله پایه 1 سنسور PIC-2319SMB انجام می گیرد.زمانیکه پایه 2 آیسی 555 تحریک شود.خازن 10 میکروفارادی به همراه مقاومت 100 کیلواهم شروع به شارژ می کند.
تحریک پایه 2 با ولتاژ زمین یا صفر است.
در مدت شارژ خازن تا اینکه کاملا شارژ شود در خروجی لبه بالارونده پالس را داریم.در این مدت LED روشن می مانند.پس از شارژ کامل خازن پایه 6 آیسی 555 تحریک می شود.با تحریک این پایه در خروجی لبه پایین رونده پالس را داریم در این مدت LED خاموش است.،چرا که اختلاف پتانسیل بوجود آمده در جهت عکس قرار گرفتن LED است.اگر جهت LED را عوض کنید در هنگام ارسال پالس LED خاموش می شود.،ودر حالت عادی که پالسی ارسال نمی شود .،روشن باقی می ماند.،تا اینکه شما دومرتبه با فشار کلید PUSH -BOTTOM در قسمت فرستنده ، پایه 2 آیسی 555 را در قسمت گیرنده تحریک کنید.اگر از خازنی بزرگتر از 10 میکروفاراد استفاده کنید.،مدت زمانیکه LED روشن می ماند بیشتر خواهد بود.
و اگر از خازنهای کوچگتر از 10 میکروفاراد استفاده کنید.LED پس از روشن شدن به سرعت خاموش می شود.
اگر رنج خازنی که استفاده می کنید.،خیلی کوچک باشد.، شما دیگر روشن شدن LED را نخواهید دید.،چراکه سرعت شارژ شدن خازن و تحریک پایه 6 آیسی 555 آنقدر سریع است که LED فرصت واکنش یا عکس العمل را ندارد.
اگر بخواهید خروجی شما در قسمت گیرنده تا ارسال پالس بعدی از فرستنده HIGH باشد.، یا LED روشن باقی بماند.می بایست از آیسی های نگهدارنده یا LATCH استفاده کنید.به جای LED از هر المان دیگری مانند یک سوییچ یا رله و بیزر نیز می توانید استفاده کنید.انتخاب المان بستگی به طراحی شما دارد.
همانطور که در ابتدا گفته شد هر یک از مدارت فرستنده و گیرنده را بر روی دو برد بورد یا برد مسی سوراخدار مجزا قرار دهید.
|
|
در این پروژه با نحوه شبیه سازی المانهای منطقی توسط کامپیوتر و استانداردu> RS232 >می شوید.در این مدار نیازی به منبع تغذیه یا باطری ندارید.
قطعات مورد نیاز
-
کابل RS232
-
1 عدد LED
-
2 کلید 1 حالته
-
سیم تلفنی
-
محیط برنامه نویسی <u>ویژوآل بیسیک</u>
کابل RS232
در این نوع از استاندارد ارسال ودریافت از طریق کامپیوتر، پین 5 زمین یا گراند است.در این استاندارد تنها سه پین خروجی وجود دارند.این سه پین عبارتند از DTR پین 4،TXD پین 3 ،RTS پین 7 به شکل پینها واسامی آنها در زیر توجه کنید.
 |
 |
نحوه بستن مدار
اگر به کابل RS232 که تهیه کرده اید به خوبی نگاه کنید.، متوجه یک سری شماره از 1 تا 9 روی سوکت آن می شوید.، این شماره ها در واقع همان شماره پینهای مربوط به ارسال و دریافت هستند.،در این مدار ما به 5 پین احتیاج داریم .،پینهای 4و5و6و7و8 پین 4 DTR ،پین 5 GND ،پین 6 DSR،پین 7 RTS ،پین 8 CTS،پین 5 در واقع زمین ما در ارسال ودریافت استانداردRS232 است که می بایست منفی LED را بر روی برد بورد به آن وصل کنید.،می توانید زمین این کابل را به منفی LED بر روی بردهای سوراخدار مسی لحیم کنید.وکل مدار خود را بر روی برد های سوراخدار مسی به جای برد بورد پیاده سازی کنید.از سیمهای تلفنی که در اختیار دارید حدود 5 تکه 5سانتی متری ببرید.حال با استفاده از هویه و سیم قلعی که تهیه کرده اید این سیمها را به پینهای سوکت RS232 که مشخص شده است.، لحیم کنید . در هنگام لحیم کردن به شماره پینها دقت کنید و برای اینکه بعدا مشکلی پیش نیاید بهتر است برای هر پین یک سیم رنگی مجزا در نظر بگیرید.،شماره هر پین در کنار آن بر روی سوکت نوشته شده است.حال DTR را که پین 4 است.را به مثبت LED وRTS را که پین 7 میباشد.، را به سر یکی از کلیدهای دوحالته بر روی برد بورد وصل کنید. و سر دیگر این کلید را به پین 6 وصل کنید..یک سر کلید دیگر را به پین 8 یا CTS وصل کنید.مانند حالت قبل سر دیگر این کلید را به پین 6 وصل کنید.
نقشه مدار
به نقشه مدار در شکل زیر توجه کنید.،زمانیکه کلید اول بسته می شود.،CTS حاوی ولتاژ می شود.و زمانیکه کلید دوم بسته می شود.DSR حاوی ولتاژ می شود.بر اساس برنامه ای که به زبان ویژوآل بیسیک نوشته شده.با توجه به ولتاژ دار شدن این دو پین DTR حاوی ولتاژ می شود.ودر واقع بر اساس نوع گیت LED روشن وخاموش می شود.
 |
برنامه ویژوال بیسیک
این برنامه به زبان ویژوال بیسیک نوشته شده.در ابتدای برنامه متغییر logic معرفی شده است.سپس در قسمت load شدن برنامه باز بودن یا نبودن پورت دوم سریال کامپیوتر بررسی می شود به طور مثال اگر به این پورت وسیله ا ی مثل موس(mouse) وصل باشد.عبارت داخل message box که بیان می کند پورت آزاد نیست بر روی صفحه نمایش یا مانیتور آشکار می شود.در خطوط بعدی پین RTS و متغییر logic با مقدار یک بار گذاری می شوند.در ادامه دستور closecom را می بینید.به محض اینکه شما برنامه را ببندید.،پورت سریال شماره 2 نیز بسته می شود.این به این خاطر است که پورت 2 برای همیشه باز نماند.،خطوط بعدی برنامه به OPTION های <u>XOR</u> ، <u>NOR</u> ، <u>AND</u> ، <u>NAND</u> ، <u>OR</u> اشاره شده است.
در انتهای برنامه مقادیر CTS ,DSR که توسط RTS بارگذاری می شوند.در داخل دو متغییر A,B قرار می گیرند.نتیجه در پین DTR بارگذاری می شود.نتیجه بارگذاری شده در DTR باعث روشن و خاموش شدن LED می شود.
1:
2: Dim Logic
3: Private Sub Form_Load()
4: If OPENCOM("COM2:9600,N,8,1") = 0 Then MsgBox "COM2 not free"
5: RTS 1
6: Logic = 1
7: End Sub
8:
9: Private Sub Form_Unload(Cancel As Integer)
10: CLOSECOM
11: End Sub
12:
13: Private Sub Option1_Click()
14: Logic = 1
15: Label3.Caption = "AND"
16: End Sub
17:
18: Private Sub Option2_Click()
19: Logic = 2
20: Label3.Caption = "OR"
21: End Sub
22:
23: Private Sub Option3_Click()
24: Logic = 3
25: Label3.Caption = "NAND"
26: End Sub
27:
28: Private Sub Option4_Click()
29: Logic = 4
30: Label3.Caption = "NOR"
31: End Sub
32:
33: Private Sub Option5_Click()
34: Logic = 5
35: Label3.Caption = "XOR"
36: End Sub
37:
38: Private Sub Timer1_Timer()
39: A = CTS: b = DSR
40: Text1.Text = Str$(A)
41: Text2.Text = Str$(b)
42: If Logic = 1 Then C = A And b
43: If Logic = 2 Then C = A Or b
44: If Logic = 3 Then C = (Not (A And b)) And 1
45: If Logic = 4 Then C = (Not (A Or b)) And 1
46: If Logic = 5 Then C = A Xor b
47: Text3.Text = Str$(C)
48: DTR C
49: End Sub
برنامه <u>Module</u>
برای انجام پروژه های<u> اینترفیس </u>(Interface) باید پینها وعباراتی را که احتیاج دارید در قسمت ماژول وارد کنید.
1:
2: Declare Function OPENCOM Lib "Port" (ByVal A$) As Integer
3: Declare Sub CLOSECOM Lib "Port" ()
4: Declare Sub SENDBYTE Lib "Port" (ByVal b%)
5: Declare Function READBYTE Lib "Port" () As Integer
6: Declare Sub DTR Lib "Port" (ByVal b%)
7: Declare Sub RTS Lib "Port" (ByVal b%)
8: Declare Function CTS Lib "Port" () As Integer
9: Declare Function DSR Lib "Port" () As Integer
10: End Sub
فایلهای DLL
برای اجرا کردن این این برنامه میبایست یک سری <u>فایل DLL</u> را در دایرکتوری SYSTEM ویندوز کپی کنید.
در هنگام دانلود کردن این فایلها پنجره ای باز می شود. بر روی دکمه Save کلیک کنید و فایل فشرده DLL را بر روی کامپیوتر ذخیره کنید. سپس با استفاده از نرم افزار های مثل Winrar این فایل فشرده را باز کنید و آنرا در داخل دایرکتوری System ویندوز کپی کنید
در این پروژه با نحوه شبیه سازی المانهای منطقی توسط کامپیوتر و استانداردu> RS232 >می شوید.در این مدار نیازی به منبع تغذیه یا باطری ندارید.
قطعات مورد نیاز
-
کابل RS232
-
1 عدد LED
-
2 کلید 1 حالته
-
سیم تلفنی
-
محیط برنامه نویسی <u>ویژوآل بیسیک</u>
کابل RS232
در این نوع از استاندارد ارسال ودریافت از طریق کامپیوتر، پین 5 زمین یا گراند است.در این استاندارد تنها سه پین خروجی وجود دارند.این سه پین عبارتند از DTR پین 4،TXD پین 3 ،RTS پین 7 به شکل پینها واسامی آنها در زیر توجه کنید.
| |
| |
نحوه بستن مدار
اگر به کابل RS232 که تهیه کرده اید به خوبی نگاه کنید.، متوجه یک سری شماره از 1 تا 9 روی سوکت آن می شوید.، این شماره ها در واقع همان شماره پینهای مربوط به ارسال و دریافت هستند.،در این مدار ما به 5 پین احتیاج داریم .،پینهای 4و5و6و7و8 پین 4 DTR ،پین 5 GND ،پین 6 DSR،پین 7 RTS ،پین 8 CTS،پین 5 در واقع زمین ما در ارسال ودریافت استانداردRS232 است که می بایست منفی LED را بر روی برد بورد به آن وصل کنید.،می توانید زمین این کابل را به منفی LED بر روی بردهای سوراخدار مسی لحیم کنید.وکل مدار خود را بر روی برد های سوراخدار مسی به جای برد بورد پیاده سازی کنید.از سیمهای تلفنی که در اختیار دارید حدود 5 تکه 5سانتی متری ببرید.حال با استفاده از هویه و سیم قلعی که تهیه کرده اید این سیمها را به پینهای سوکت RS232 که مشخص شده است.، لحیم کنید . در هنگام لحیم کردن به شماره پینها دقت کنید و برای اینکه بعدا مشکلی پیش نیاید بهتر است برای هر پین یک سیم رنگی مجزا در نظر بگیرید.،شماره هر پین در کنار آن بر روی سوکت نوشته شده است.حال DTR را که پین 4 است.را به مثبت LED وRTS را که پین 7 میباشد.، را به سر یکی از کلیدهای دوحالته بر روی برد بورد وصل کنید. و سر دیگر این کلید را به پین 6 وصل کنید..یک سر کلید دیگر را به پین 8 یا CTS وصل کنید.مانند حالت قبل سر دیگر این کلید را به پین 6 وصل کنید.
نقشه مدار
به نقشه مدار در شکل زیر توجه کنید.،زمانیکه کلید اول بسته می شود.،CTS حاوی ولتاژ می شود.و زمانیکه کلید دوم بسته می شود.DSR حاوی ولتاژ می شود.بر اساس برنامه ای که به زبان ویژوآل بیسیک نوشته شده.با توجه به ولتاژ دار شدن این دو پین DTR حاوی ولتاژ می شود.ودر واقع بر اساس نوع گیت LED روشن وخاموش می شود.
| |
برنامه ویژوال بیسیک
این برنامه به زبان ویژوال بیسیک نوشته شده.در ابتدای برنامه متغییر logic معرفی شده است.سپس در قسمت load شدن برنامه باز بودن یا نبودن پورت دوم سریال کامپیوتر بررسی می شود به طور مثال اگر به این پورت وسیله ا ی مثل موس(mouse) وصل باشد.عبارت داخل message box که بیان می کند پورت آزاد نیست بر روی صفحه نمایش یا مانیتور آشکار می شود.در خطوط بعدی پین RTS و متغییر logic با مقدار یک بار گذاری می شوند.در ادامه دستور closecom را می بینید.به محض اینکه شما برنامه را ببندید.،پورت سریال شماره 2 نیز بسته می شود.این به این خاطر است که پورت 2 برای همیشه باز نماند.،خطوط بعدی برنامه به OPTION های <u>XOR</u> ، <u>NOR</u> ، <u>AND</u> ، <u>NAND</u> ، <u>OR</u> اشاره شده است.
در انتهای برنامه مقادیر CTS ,DSR که توسط RTS بارگذاری می شوند.در داخل دو متغییر A,B قرار می گیرند.نتیجه در پین DTR بارگذاری می شود.نتیجه بارگذاری شده در DTR باعث روشن و خاموش شدن LED می شود.
1:
2: Dim Logic
3: Private Sub Form_Load()
4: If OPENCOM("COM2:9600,N,8,1") = 0 Then MsgBox "COM2 not free"
5: RTS 1
6: Logic = 1
7: End Sub
8:
9: Private Sub Form_Unload(Cancel As Integer)
10: CLOSECOM
11: End Sub
12:
13: Private Sub Option1_Click()
14: Logic = 1
15: Label3.Caption = "AND"
16: End Sub
17:
18: Private Sub Option2_Click()
19: Logic = 2
20: Label3.Caption = "OR"
21: End Sub
22:
23: Private Sub Option3_Click()
24: Logic = 3
25: Label3.Caption = "NAND"
26: End Sub
27:
28: Private Sub Option4_Click()
29: Logic = 4
30: Label3.Caption = "NOR"
31: End Sub
32:
33: Private Sub Option5_Click()
34: Logic = 5
35: Label3.Caption = "XOR"
36: End Sub
37:
38: Private Sub Timer1_Timer()
39: A = CTS: b = DSR
40: Text1.Text = Str$(A)
41: Text2.Text = Str$(b)
42: If Logic = 1 Then C = A And b
43: If Logic = 2 Then C = A Or b
44: If Logic = 3 Then C = (Not (A And b)) And 1
45: If Logic = 4 Then C = (Not (A Or b)) And 1
46: If Logic = 5 Then C = A Xor b
47: Text3.Text = Str$(C)
48: DTR C
49: End Sub
برنامه <u>Module</u>
برای انجام پروژه های<u> اینترفیس </u>(Interface) باید پینها وعباراتی را که احتیاج دارید در قسمت ماژول وارد کنید.
1:
2: Declare Function OPENCOM Lib "Port" (ByVal A$) As Integer
3: Declare Sub CLOSECOM Lib "Port" ()
4: Declare Sub SENDBYTE Lib "Port" (ByVal b%)
5: Declare Function READBYTE Lib "Port" () As Integer
6: Declare Sub DTR Lib "Port" (ByVal b%)
7: Declare Sub RTS Lib "Port" (ByVal b%)
8: Declare Function CTS Lib "Port" () As Integer
9: Declare Function DSR Lib "Port" () As Integer
10: End Sub
فایلهای DLL
برای اجرا کردن این این برنامه میبایست یک سری <u>فایل DLL</u> را در دایرکتوری SYSTEM ویندوز کپی کنید.
در هنگام دانلود کردن این فایلها پنجره ای باز می شود. بر روی دکمه Save کلیک کنید و فایل فشرده DLL را بر روی کامپیوتر ذخیره کنید. سپس با استفاده از نرم افزار های مثل Winrar این فایل فشرده را باز کنید و آنرا در داخل دایرکتوری System ویندوز کپی کنید
عنوان اصلی مقاله:RF MODEM ROBOTICS PROJECT

RufBOT از سیستم TWS434RF استفاده می کند
استفاده از RF در طرحهایتان راه حل مناسبی است. ولی اگر شما نیز مانند من مبتدی باشید , ساختن موفقیت آمیز یک فرستنده-گیرنده Solid RF سخت است.
وقتی که من شروع به کار کردم ,نمی دانستم فلز برد بورد[1] مانند خازنهای کوچکی عمل نموده و باعث اعوجاج سیگنال فراوانی شده ,که در نتیجه عملکرد و پویایی مدار تغییر میکند.
پس از تحقیق زیاد جفت فرستنده-گیرنده TWS 434 و RWS 434 از Reynolds Electronics را پیدا کردم.البته من تولیدات مشابهی از MING Microsystems و Radioshack را نیز امتحان کردم, اما محصول Reynolds Electronics از لحاظ قابلیت , قیمت و راحتی کار با آن بهتر از بقیه بود.بنابراین به کمک آن و نیز دو میکروکنترلر PIC16F84 [2] کار کردن روی رابط سریال RF خود که واسط بین کنترل گر(جوی استیک[3]) و روبوت بود را شروع کردم.شما می توانید این قطعات را در www.rentron.com/rf_remote_control.htm بیابید.

نمای بالای ساختمان روبوت که روی یک برد بورد کوچک قرار دارد

شماتیک مدار
من متوجه شدم جفت مدار فرستنده-گیرنده و ارتباط سریال تعبیه شده در زبان برنامه نویسی PICBasic موجود در PIC های من,با یکدیگر به خوبی کار می کنند.من مطمئن نبودم , مدار با تبادل سریال غیرهمزمان و با نرخ[4] (باود) 9600 خوب کار کند چون در سرعتهای بالا انتظار یک سری مشکلات را داشتم, اما در عمل به اشکالات اندکی برخورد کردم.من به سادگی موقعیت پتانسیومتر موجود در جوی استیک را با استفاده از دستور POT که از دستورات PICBasic است, خواندم و نتیجه را در موقعیت B0 قرار دادم. و از آنجا با دستور SEROUT محتوای B0 حافظه را به پایه 6 فرستنده TWS 434 ارسال نمودم تا داده دریافتی از پین 3 , RWS 434 را خوانده و حاصل را در B0 قرار دهدم.
مقادیر موجود در B0 با موقعیت جوی استیک رابطه مستقیم دارد.ورودی بالاتر از 150 نشانگر "راست" است , پایین تر از 106 علامت چرخش به "چپ" بوده و میان این دو , نشان دهنده "مرکز" است.با استفاده از این اعداد می توان یک محدوده تعریف کرد.


PIC اطلاعات دسته بازی(جوی استیک) را خوانده و ارسال می نماید

شماتیک مدار فرستنده
در این نقاط اشارات(جهت حرکت دسته بازی) به سادگی قابل مشاهده است.از طریق اعداد فرستاده شده می توانیم مسیر(راست ,چپ و غیره) و همچنین میزان انحراف به چپ و راست را تعریف کنیم. با این داده ها امکان تعریف "کنترل سرعت" وجود دارد.برای اعداد دورتر از 128 (مرکز) سرعت بیشتری اعمال شده است[5].در مورد این مدار , من از پایه های PORTA از PIC برای کنترل مسیر موتور استفاده کردم ولی کنترل سرعت نکردم.از آنجا که داده سریال ده بیتی است(یک بیت شروع ,هشت بیت داده و یک بیت پایانی) می توانیم در عرض یک ثانیه , 960 دستور را به PIC گیرنده بفرستیم که برای قطعات زیر 20 دلار بد نیست.با استفاده از آنتن هایی که برای تلفن های بیسیم 900 MHz ساخته شده است , توانستم در فضای آزاد به برد 350 فوت[6] برسم و هنگامی که تغذیه گیرنده را کمی از 12 ولت بیشتر کردم به بورد 500 فوت[7] نیز رسیدم(این کار توصیه نمی شود).
توجه:من از خروجی خطی برای گیرنده ام استفاده کردم چون می خواستم ببینم حداکثر نویزی که با وجود آن(که تولید اعوجاج در سیگنال می کند) مدار کار می کند چقدراست.در موردی که توان سیگنال به بورد 500 فوت رسید هر نوع نویز در فرکانس باعث بروز اشکال می شود.
قطعه کد زیر نشان می دهد که قطعات موجود در سیستم شما چقدر ساده کار می کنند.
بازدید دیروز: 4
کل بازدید :41576

